Why you often need to "bend reality" to be successful in PID Tuning
The world is a very non-linear place. The chances are that your process does not respond to your actuator like a well behaved process should, that is LINEARLY. And if your process has flows, temperatures pressures or other pesky real-world characteristics, I would happily put money on the response not being linear!
Why is this a problem?
Well, it’s a pain in the butt because the PID algorithm has been designed to work at its best where the process responds linearly to an actuator, so a non-linear response can make good tuning really bloody difficult..
(If you want to understand why the PID algorithm prefers linear responses, the algorithm is explained in plain English in the “Complete Idiot’s Guide to the PID Algorithm” which is available as a bonus with the PID Tuning Blueprint
This common non-linear behaviour is a huge reason that there are so many poorly tuned PID loops out there.
The best way to deal with a non linear response is to use a Linearizer. (I love that word but my spell checker hates it - Only an engineer could invent such a cool word!)
Here’s a procedure for implementing a linearizer on a (self regulating) loop:
- Put your loop in manual
- Step your actuator from 0-100% in approx 5% steps, measuring the settled PV at each step. Do this at a normal operating load.
- In Excel, use the Chart Wizard to plot the controller output (MV) vs the PV as a scatter plot, with data points connected by smooth lines.
- If you get a straight(ish) line, you're in luck. Your process is linear. Skip the linearizer step below.
- If you get a curve, then it's time to linearize!
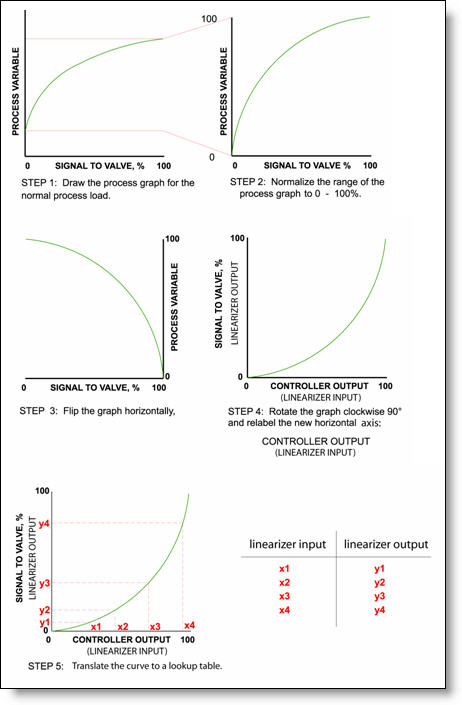
The resulting lookup table can be used to configure the “Linearizer” or “Characterizer” functionality of most PID controllers, Programmable Logic Controllers and Distributed Control System’s.
Stick the magic numbers that pop out of the procedure I’ve just given you and your process will perform a whole lot better, giving you a faster, more stable response than without the linearizer.
If you want to perform the above linearization in about 3 seconds flat, then the “Linearizer Excel Macro” that comes as a bonus with the PID Tuning Blueprint can do all the work for you.
You can download it here